
如何在仿真环境中还原机器人力控?你只需要一个 Flexiv Sim Plugin
近日,非夕推出Flexiv Sim Plugin插件,将高精度的机器人力控仿真引入外部仿真软件中。这一软件工具使自适应机器人开发者和终端用户能够在外部仿真软件中编程、测试和部署带力控的机器人应用,尽可能模拟现实物理世界操作。
Flexiv Sim Plugin可以将非夕自研的机器人仿真器Elements Studio与任意外部仿真软件桥接起来,如Isaac Sim、MuJoCo等,从而在其中实现自适应机器人的一系列力控操作。
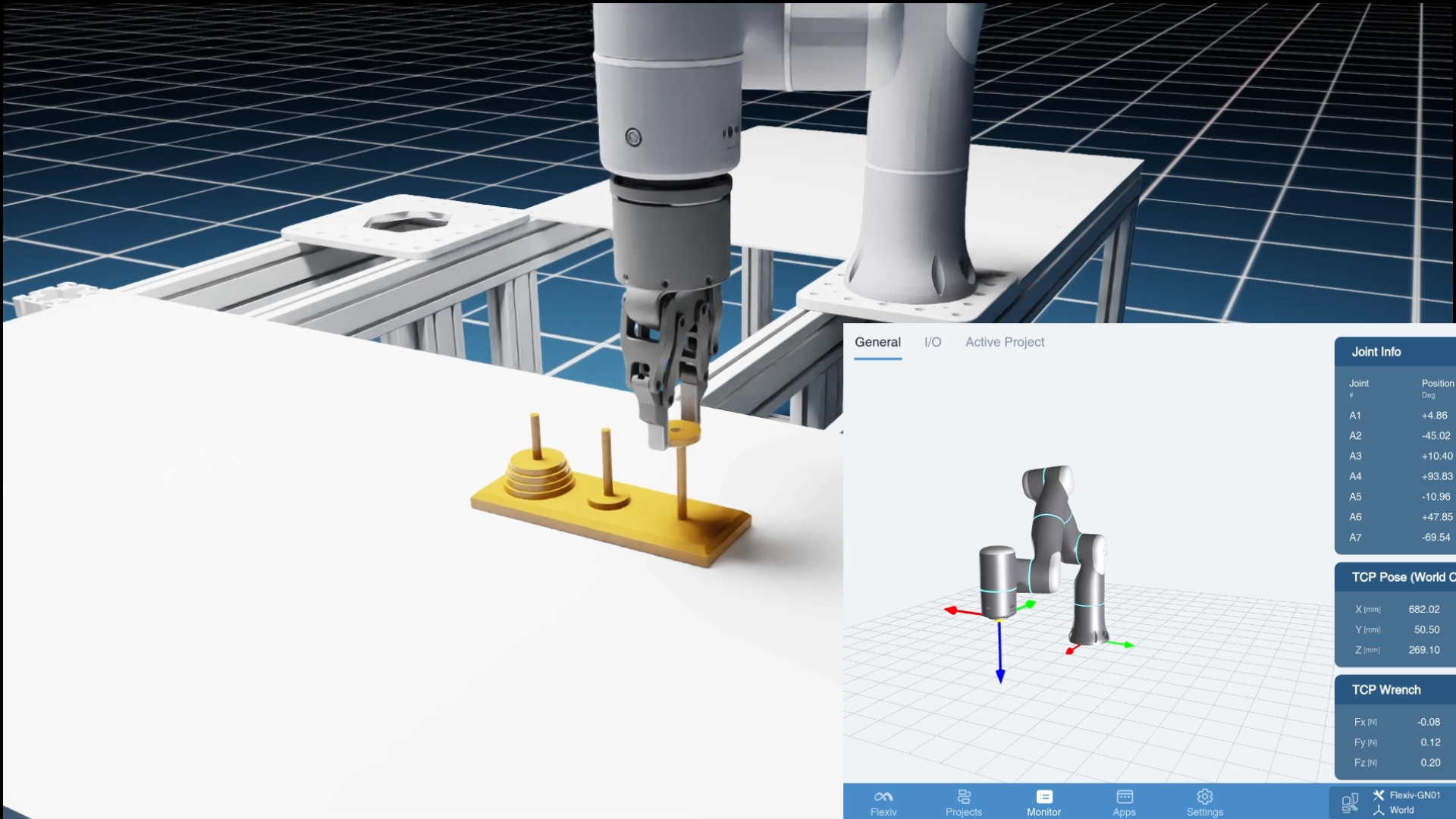
为展示这一新功能,非夕的工程师团队制作了一段视频演示:在Flexiv Sim Plugin的帮助下,拂晓Rizon 4在Isaac Sim仿真环境中借助多个力控元操作完成了经典的汉诺塔游戏,并使用完全相同的代码在现实场景中实现了该操作。
汉诺塔谜题(Tower of Hanoi)是一个经典的数学游戏,它包含三个桩子和 n 个大小不同的带孔圆盘,这些圆盘按大小顺序(最大的在底部)堆叠在第一个桩子上。游戏目标是将所有圆盘从第一个桩子移动到第三个桩子,规则包括一次只移动一个圆盘、只取桩子顶部的圆盘,以及较大的圆盘不能被放置在较小的圆盘上。
由于带孔圆盘和柱子之间的间隙很小,这对机器人来说实际上也是一个典型的精细插装任务;此外,工程师还为木桩设置了2mm的位置误差,这使得自适应机器人需要在操作过程中用到“力控搜孔”和“柔顺力控”等“元操作”,充分发挥力控能力,才能顺畅柔性地完成全部流程。
可以从视频中看出,结合了Flexiv Sim Plugin后,仿真中的机器人也能进行搜孔和柔顺力控操作,在有位置误差的情况下,仍然保证100%的圆孔置入成功率。
在这次演示中,英伟达Isaac Sim作为高保真度仿真软件,使开发者能够构物理效果精准的模拟环境,从而在其中进行接近真实环境的应用开发、模型训练、运行测试和模拟部署;而非夕自研的Elements Studio机器人仿真器则提供了交互界面和与真机相同的高性能机器人控制系统。
Flexiv Sim Plugin插件将Isaac Sim的现实仿真能力与Elements Studio的机器人力控能力有效结合,从而帮助用户解决sim2real问题,提升应用开发效率,并大幅降低开发和测试成本。
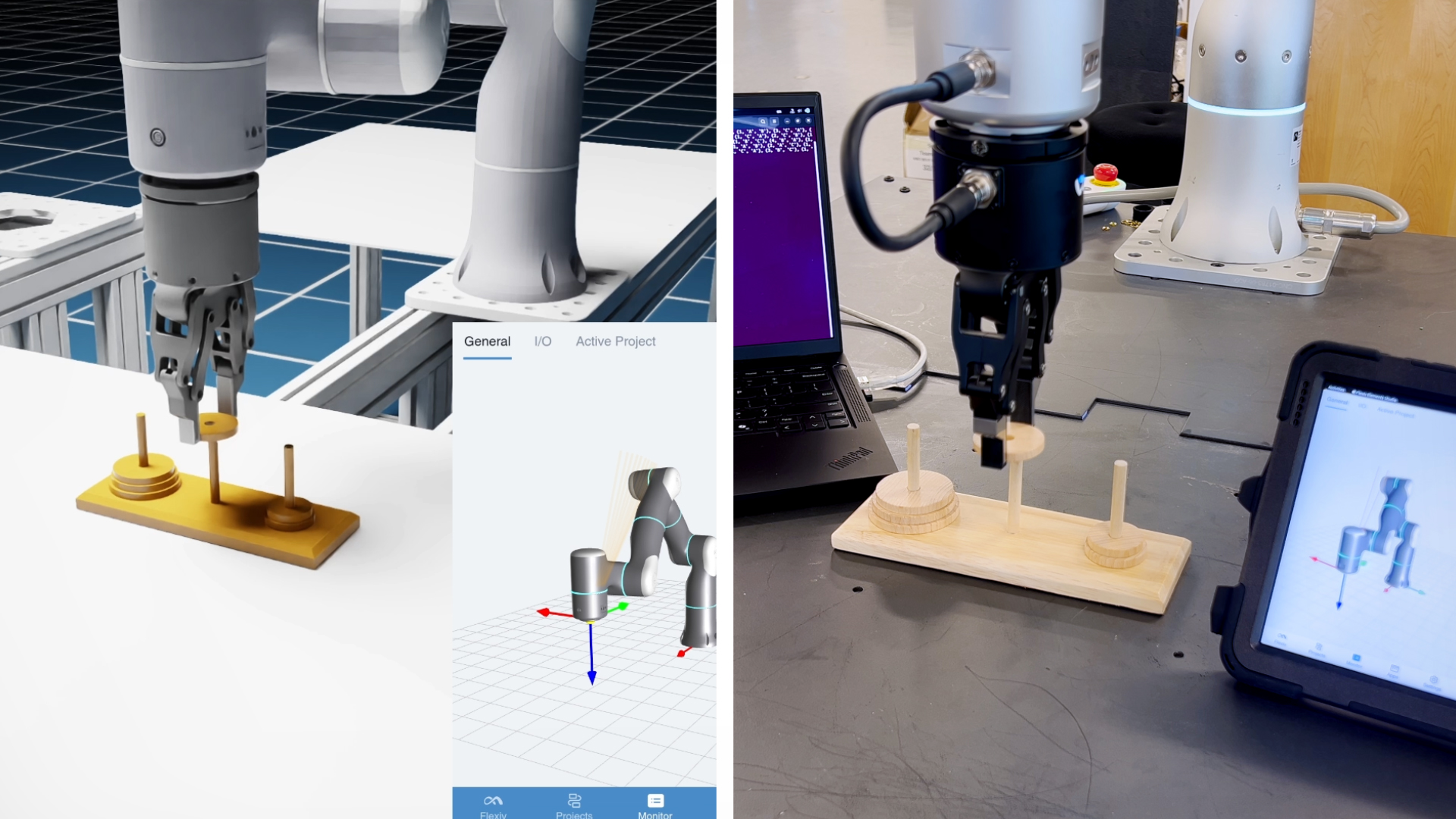
“汉诺塔游戏是展示在Flexiv-Isaac框架下将机器人应用从模拟环境无缝移植到现实环境中的一个经典演示。我们在模拟环境和现实环境中运行的是同一个Python程序,无需任何代码修改。”Flexiv Sim Plugin负责人朱培章表示,“在今后的机器人应用开发流程中,用户可以先在仿真环境中并调试出已达到交付标准的完整解决方案,再将其原封不动的部署到现实环境中,并得到与仿真相同的结果。该框架终于使得仿真模拟成为生产过程中的一个实用环节。”
目前,非夕已经在 GitHub 上免费开放了Flexiv Sim Plugin,访问页面并获取更多信息:
https://github.com/flexivrobotics/isaac_sim_ws




