
非夕科技登陆国际顶会 IROS 2025:以自适应机器人探索具身智能新边界
2025年10月21日, 非夕科技亮相在杭州举行的 IEEE/RSJ国际智能机器人与系统会议 IROS 2025。作为全球机器人与智能系统领域最具影响力的学术与产业盛会之一,本届IROS吸引了来自世界各地的顶尖科研机构与创新企业。
非夕携最新的遥操作系统与增强型力控夹爪星擎 Grav Enhanced 亮相展示,并在大会上发表演讲,分享其在“具身智能与自适应控制”方向上的前沿探索。

以力控为核心
拓展机器人交互边界
非夕此次重点展示的自适应机器人遥操作系统由主从机械臂构成,操作者通过主机械臂即可实时控制从属机械臂的动作,并获得精准的双向力觉反馈。
这一系统基于非夕自主研发的机器人遥操作工具包 Flexiv TDK (Teleoperation Development Kit) 开发而成,具有卓越的稳定性和极高的透明度,可广泛应用于医疗手术、科学实验、危险环境作业、以及具身智能等领域。

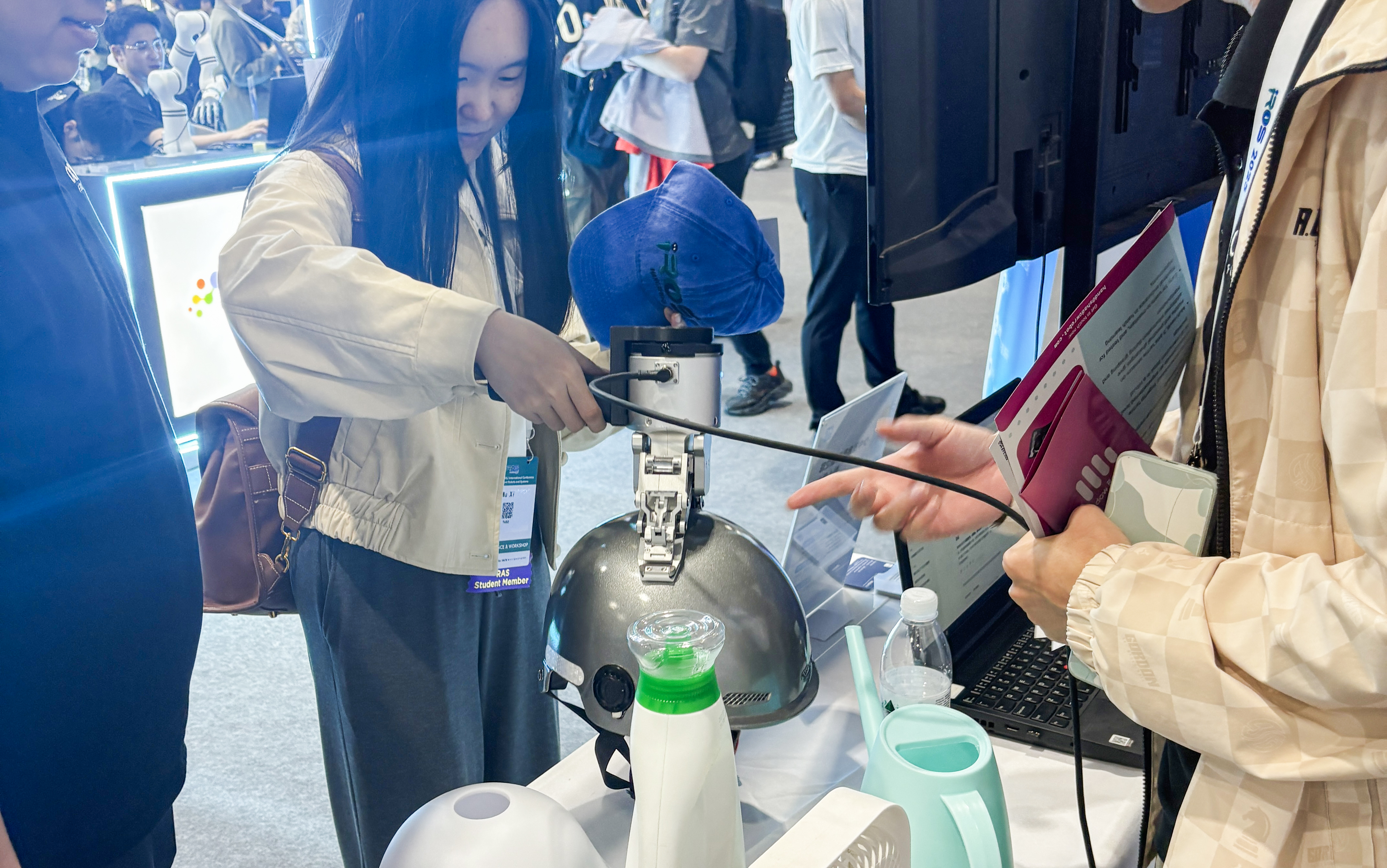
在IROS 2025现场,非夕特别设置了多个具有不同触感和摩擦力的交互道具,观众可通过主机械臂进行实时操作。当从臂触碰到软、硬、滑、涩等不同质地的物体时,系统能够将这些微妙的力觉变化与摩擦差异实时传输回主臂,让操作者清晰感知每一次接触的阻力变化。这种高保真的双向力反馈,让遥操作从“视觉远程控制”真正迈向“力觉沉浸交互”,成为展会现场最具科技感的体验之一。

该系统支持轻量级操作——操作者仅需施加超过0.5N的微小外力即可轻松驱动机械臂,系统能够将从属机械臂感知到的外力以高保真度实时反馈给操作者,实现近乎“无延迟”的沉浸式力觉体验。在连续、精细的接触性操作中,系统可沿指定方向保持柔顺稳定的控制,有效抑制操作者手抖造成的误差,使操作更自然、安全、平稳。

此外,遥操作系统具有极高的通用性与安全性,可根据场景灵活搭载外部工具并实现多臂协同控制。其通信架构具备抗延迟与抗干扰特性,即便在网络波动、丢包等情况下也能确保设备与操作者的安全。操作者还可在操作过程中随时脱离或同步控制从臂,长时间保持舒适的操作姿态。
阅读此篇内容,可了解更多非夕遥操作的技术特征与优势。
增强型夹爪
释放通用机器人潜能
另一大亮点是非夕新一代增强型力控夹爪星擎(Grav Enhanced)。在标准版夹爪Grav单驱动器和复合传感模组的基础上,Grav增强型拥有全新设计的“壁虎手指”,支持指尖的平行抓取和夹角包覆式抓取的双模式切换。在仿生壁虎材料的加持下,Grav增强型拥有强大的物体适应性,使其能够抓取许多形状及接触相对复杂的对象,无论是金属、玻璃还是复合材料表面,都能实现可靠吸附与柔性释放,为自动化抓取带来更高的通用性与灵活性。
换句话说,在保留刚性抓取能力的基础上,增强夹爪采用柔性的仿生壁虎材料,可贴合不同形状的接触面,兼具高适应性与柔性抓取能力,适用于精细装配、果蔬采摘和分拣等场景。同时具备抗弯矩能力,可完成复杂操作任务。
目前,这款增强型夹爪已开启大批量预定与销售。
技术分享:
具身智能的现实跃迁
在10月23日的同期大会技术论坛上,非夕科技产品开发经理李书涵(Shuhan Li)将发表题为 《Breaking Down Barriers: How Human-Inspired Design Drives General-Purpose Robotics》 的主题演讲。
他将从非夕的仿人化技术路径出发,探讨非夕如何通过模拟人类的运动控制与感知机制,为通用机器人注入更强的柔顺性、适应性与智能交互能力。演讲将展示非夕在产品设计、开放接口与生态合作等方面的最新进展,并分享公司如何以开放、模块化的架构推动自适应机器人在更多行业实现价值落地。
作为通用智能领域的代表企业之一,非夕科技始终坚持“仿人化”的技术路径,持续推动机器人和具身智能的产业化落地。值得一提的是,在具身智能领域,非夕科技已助力海内外众多科研机构和企业,例如:Generalist AI、穹彻智能、ULTRA等公司,共同推进通用机器人能力边界的不断突破。
通过参与IROS这一国际顶级学术舞台,非夕希望与全球科研机构、产业伙伴共同探索智能机器人从理论到实践的关键路径,加速行业迈向更普适、更可靠、更智能的未来。




