
非夕科技亮相Automate 2026:Enlight、MICO海外发布,多元生态共筑具身智能基座平台
6月22日,北美机器人与自动化展会Automate 2026在美国芝加哥开幕。非夕科技携新一代自适应机器人Enlight初昕及一体化仿人智能平台MICO正式亮相,完成两款新品的海外发布。

发布活动于展会首日在非夕科技2844号展位举行。作为非夕面向具身智能时代推出的新一代机器人产品,Enlight和MICO进一步强化了机器人对接触、作用力及复杂环境的感知与响应能力,为具身智能模型训练、操作策略验证和真实场景部署提供高性能机器人本体与系统平台。
此外,Generalist AI、Industrial Next、Saint-Gobain、NVIDIA、Kurabo、QNX、TSLOTS等多家合作伙伴也都带来了结合自适应机器人的应用展示,集中展现了非夕作为具身智能基座平台的开放性、通用性和生态承载能力。
从全身感知到双臂协同
Enlight与MICO构建具身智能物理底座
本次海外发布的Enlight初昕,是非夕面向具身智能时代推出的新一代全感知自适应机器人。Enlight在七个关节中均集成多维力传感器,构建覆盖整条机械臂的全域感知网络,使机器人不仅能够感知末端接触,也能够实时感知机械臂本体不同部位的受力状态。其整臂分布有25万个触摸点位,最多支持7点同时接触感应,为复杂接触操作、多元化人机交互、具身智能数据采集及模型训练提供更可靠的机器人本体基础。

基于Enlight的本体能力和控制架构,非夕进一步推出一体化仿人智能平台MICO。MICO通过统一控制系统实现双臂协同感知、运动规划与力控配合,并可灵活组合双臂、腰部、视觉系统及移动底盘等模块,为具身智能研发、双臂操作验证及真实场景部署提供标准化机器人平台。
非夕科技首席机器人科学家钟书耘表示:“Enlight和MICO的推出,不仅是非夕产品发展中的重要节点,也代表着通用机器人感知与操作能力的一次跃迁。我们希望通过更敏锐的触觉感知和更强的环境适应能力,让机器人能够更安全、更高效地进入真实环境。”
从工业应用到具身工具链
非夕打通真实世界操作能力
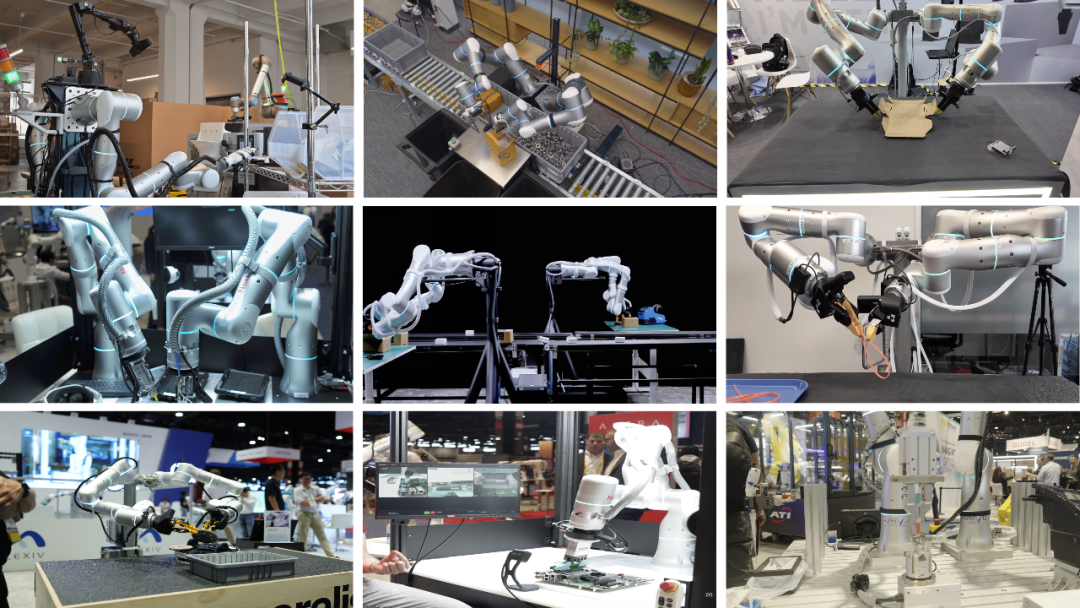
除Enlight和MICO的海外发布外,非夕还在Automate 2026现场带来多项机器人应用演示,覆盖精密装配、复杂表面处理、移动作业、具身工具链等方向,集中展示自适应机器人面向真实世界操作的能力体系。
MICO通过整机力感知和双臂协同控制,在力控搜孔、触碰、扣合等多个工序中自主采用先进的力控策略,灵巧地完成对英伟达显卡的精密装配。
以Rizon为基础的AICO-2双臂平台在现场演示了服务器插装的移动作业。以机械臂Rizon和夹爪Grav的高精度力控为基础,通过结合移动底座,该工站能够连续完成工件柔顺抓取、高效运输、精密置入与回收的连续作业,展示自适应机器人在数据中心等场景中的维护和照看能力。
以Rizon 10s为基础的全自动打磨抛光工作站由非夕携手客户圣戈班联合开发。通过结合Scan-to-Polish软件,自适应机器人可以自主完成工件的三维扫描建模、最优打磨区域判断、打磨轨迹规划,并最终进行柔性的力控打磨。基于先进的力位混合控制,Rizon 10s能够无缝贴合曲面轮廓,并保持恒定的下压力,实现高质量的作业效果。
此外,这次非夕的北美团队还带了“新东西”到Automate。为了不断丰富自适应机器人的开发工具链、深度支持具身智能模型开发与实景复现,非夕自研了可训练机器人“skill”的一体化、本地化软件工具:Flexiv Trainer。在现场,工程师向观众演示如何通过非夕双臂遥操作采集集合视觉、力控、阻抗信息的操作数据,并通过Flexiv Trainer将其训练为自适应机器人技能的完整工作流。

多元生态伙伴齐聚
非夕提供“平台价值”
在本届Automate上,还有很多非夕的生态伙伴带来了以自适应机器人为基础的应用。
Generalist AI用自己的最新模型GEN-1,结合双臂Rizon,演示了如何给一个被任意摆放的扫地机换抹布。在通用智能和通用基座的双重努力下,机器人能够自主借助环境进行支撑,双臂的协同操作十分优雅、默契,同时还能够足够轻巧的力在不“伤害”抹布的前提下将其拆掉。
Industrial Next则将他们在实际电子装配产线中的应用场景搬上了非夕展台。作为专注落地精密制造领域的具身智能公司,Industrail Next利用自适应机器人的柔性、精细、可靠,实现工厂里高精度、强接触任务的智能自动化。
非夕的自适应机器人还出现在BlackBerry QNX、Kurabo、TSLOTS等伙伴的应用展示中,覆盖前沿研发、汽车零件组装、实验室自动化等多个场景。
作为NVIDIA的全球生态合作伙伴,非夕此次的展台上也多次出现先进机器人技术与英伟达软硬件产品的结合演示:非夕-圣戈班打造的打磨工站接入Isaac Sim,打磨路径可先在仿真环境中进行测试和训练,并通过Flexiv Sim Plugin插件实现力控在仿真环境中的还原,极大提升了测试效率;Flexiv Trainer依靠一套NVIDIA Jetson即可部署,轻便快捷,为具身开发提供强力支持。
北美市场持续升温
具身智能需求进入加速阶段
今年,Automate不仅是全球最新自动化产品的展示场,也是观察北美具身智能产业发展趋势的重要窗口。
当前,北美已成为全球具身智能研发和商业化最为活跃的市场之一。大型科技企业、人工智能公司和机器人初创企业正在持续加大机器人本体、数据采集、模型训练及真实场景验证方面的投入,对极致力控性能的自适应机器人和通用开发平台的需求快速增长。
凭借高精度力控、环境适应能力和开放的开发体系,非夕机器人已成为北美具身智能创新生态中的重要平台之一。除Generalist AI、Industrial Next等公司,非夕已进入多家全球领先的明星科技企业及具身智能公司的研发与应用体系,产品被广泛应用于机器人数据采集、模型训练、策略验证和复杂任务部署。
除北美外,非夕在海外其他地区的具身智能领域的业务和生态拓展也进展迅速,目前已与数十家具身头部企业建立合作,多家已进入批量落地部署阶段。
本届Automate上的多元伙伴齐聚,是非夕长期生态合作与产业协同的阶段性呈现。从具身智能模型开发、仿真训练和实时控制系统,到先进制造、规模化工业应用和创新服务场景,越来越多合作伙伴正基于非夕机器人开展持续创新与场景验证,共同推动具身智能技术从实验室走向真实世界。
从Enlight和MICO的海外发布,到多位生态伙伴的自发展示,非夕正在Automate 2026呈现一个不断扩大的具身智能生态网络:以高性能自适应机器人为本体基础,连接模型、软件、仿真和场景应用,持续建设面向真实世界操作的具身智能基座平台。
未来,非夕将继续深化北美及全球市场布局,与更多技术伙伴、开发者和行业客户共同推动具身智能从技术验证走向规模化应用。




