|
Flexiv RDK APIs
1.9.0
|
|
Flexiv RDK APIs
1.9.0
|
#include "robot.hpp"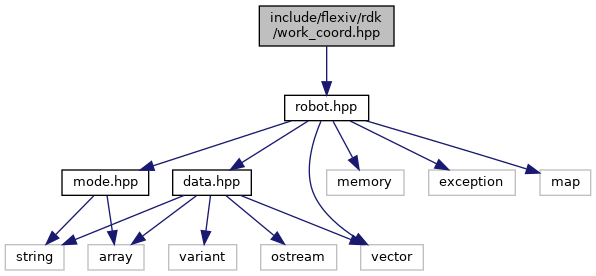
Go to the source code of this file.
Classes | |
| class | flexiv::rdk::WorkCoord |
| Interface to manage work coordinates of the robot. All updates take effect immediately without a power cycle. However, the robot must be in IDLE mode when applying changes. More... | |
Definition in file work_coord.hpp.