|
Flexiv RDK APIs
1.9.0
|
|
Flexiv RDK APIs
1.9.0
|
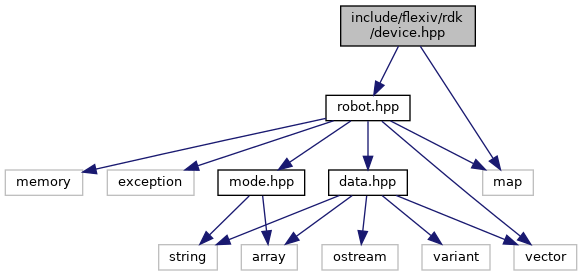
Go to the source code of this file.
Classes | |
| class | flexiv::rdk::Device |
| Interface to control the peripheral device(s) connected to the robot. More... | |
Typedefs | |
| using | flexiv::rdk::DeviceParamDataTypes = std::variant< int, double, std::string, std::vector< double >, std::vector< std::string > > |
Definition in file device.hpp.