
非夕科技发布ROS 2程序包,优化自适应机器人二次开发
2022年9月,Flexiv非夕科技发布ROS 2程序包,代表着由非夕研发生产的自适应机器人全部支持ROS 2。

Flexiv ROS 2程序包为用户提供了更好的机器人易用性和更广的开发可达性。在其帮助下,广泛的开发者和工程师无需精通Flexiv RDK,即可利用关于ROS 2的经验和知识来构建自适应机器人相关的应用,探索多样的使用场景。
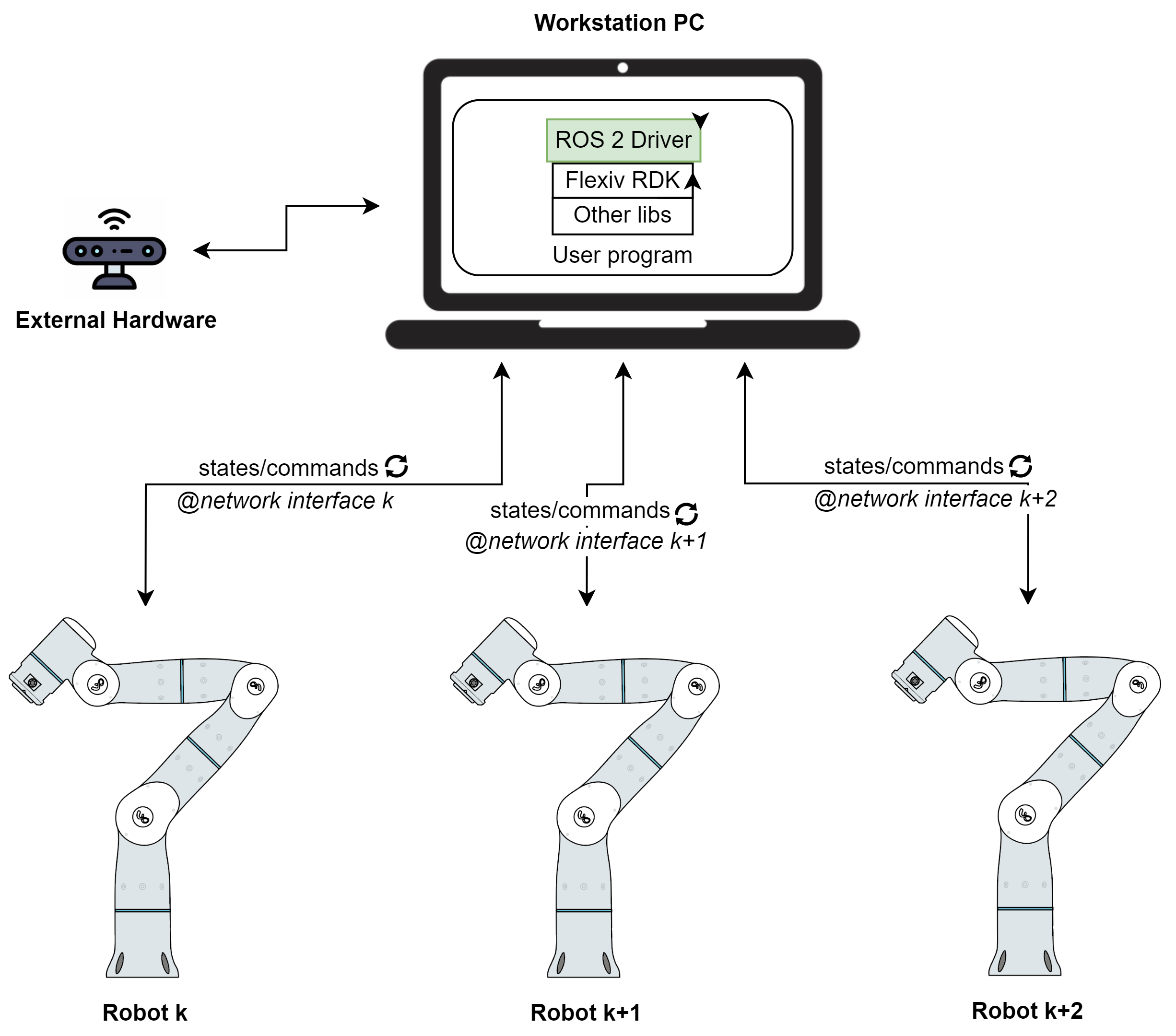
Flexiv的ROS 2程序包以强大的开发工具包Flexiv RDK为基础,支持Ubuntu系统。用户可以直接通过ROS 2中的功能包,如ros2_control(多类型控制器提供及管理、上层应用与仿真或样机的连接)、Moveit(运动规划、碰撞检测、运动学、3D感知、操作控制等)、Rviz(3D可视化工具)等,实时完成对机器人关节的位置/轨迹/速度/力/力矩等的控制。
ROS(Robot Operating System)是一个功能强大且灵活的机器人编程框架,它提供了一系列开源的程序库、工具和惯例,以及设备驱动、算法、库函数、可视化、消息传递和软件包管理等诸多功能,帮助软件开发者创建机器人应用。
ROS始于2007年,目前推出了ROS1和ROS2两个版本。相比于ROS 1,ROS 2有运行更可靠、持续性更好、更节省资源、消息传递更实时的优势,更适合应用在工业生产环境,因此该框架被广泛地使用于工业机器人、服务机器人、自动驾驶、机械手智能控制等新兴机器人领域。
点击“此处”可访问查看ROS 2程序包及其相关指引。非夕会持续推进此程序包的迭代更新,使其能与控制器进行运动指令、位置、速度、力、IO、计划执行、安全状态等的交互,赋予机器人更多的可能性。




